
CCM成像质量指标——摄像头模组(CCM) 检测方案(三)
1:成像均匀性(Corner Shading)
测试环境:白板测试环境。
由于相机镜头的关系,使得图像传感器表面各个部位获得的光能量有所差异,从而导致图像四角或周边与中心存在明暗以及颜色的差异,即图像的不均匀性,如图所示。
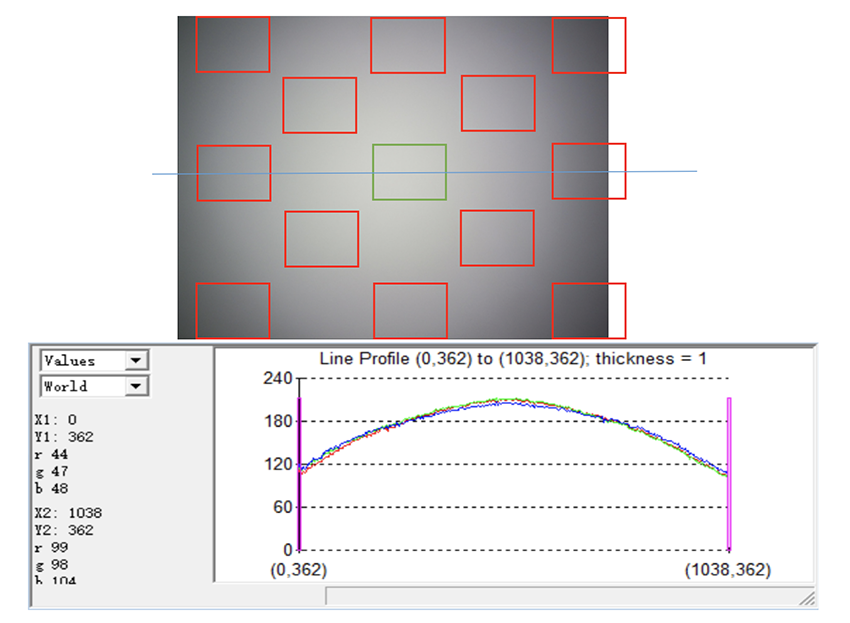
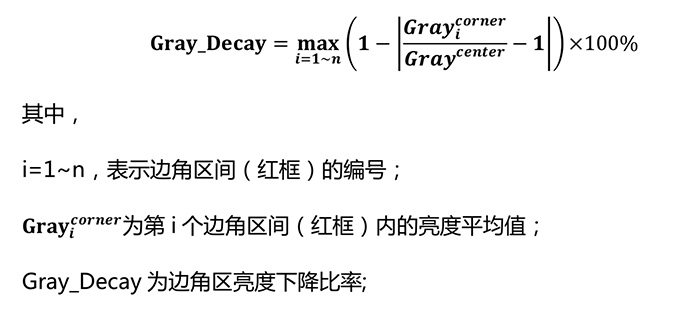
1.1 亮度均匀度
1.2 颜色差

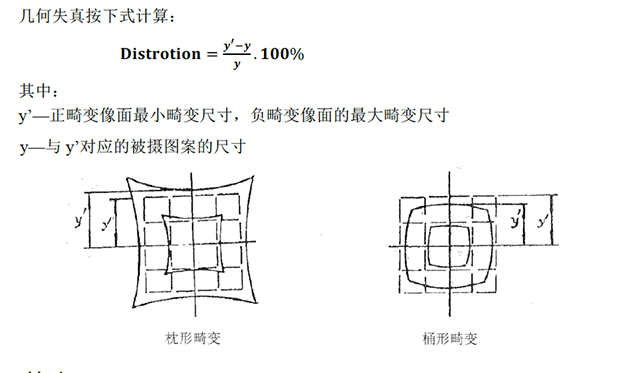
2:几何失真(Distrotion)
测试环境:畸变测试卡测试环境。
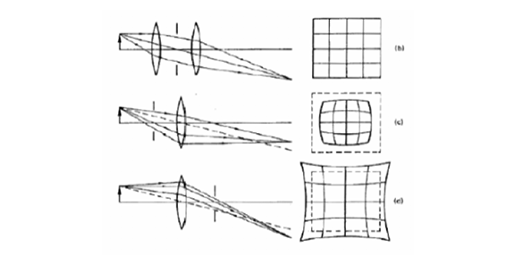
几何失真即畸变,是指放大率随视场的增大而变化所引起的一种失去物像相似的像差只影响像的形状而不影响像的清晰度。
在像平面上位置不同,有不同的放大倍率。因此,出现物体形变,分为桶形畸变和枕形畸变。
2.1 算法一
2.2 算法二
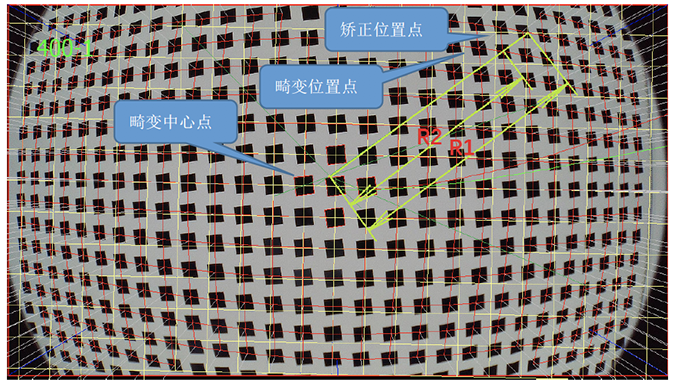
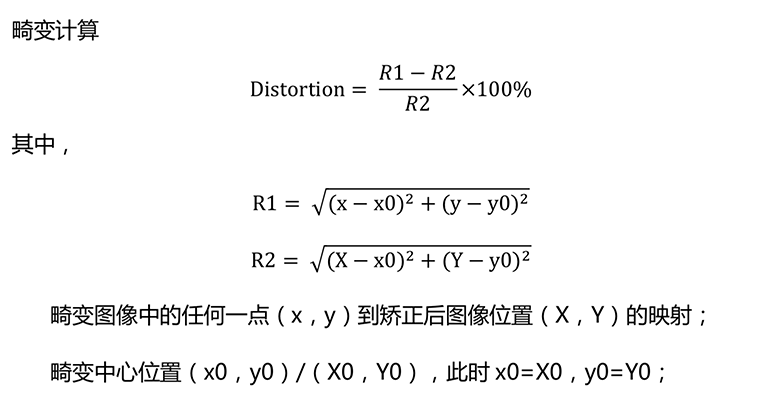
本方法实际上基于图像矫正原理,将畸变图像矫正,根据畸变图像和矫正图像的数学映射关系:
畸变图像中的任何一点(x,y)到矫正后图像位置(X,Y)的映射;
畸变中心位置(x0,y0)/(X0,Y0),此时x0=X0,y0=Y0;
矫正后图像的像素比例K(mm/pixel)
3:图像色彩还原
测试环境:彩色测试卡测试环境。
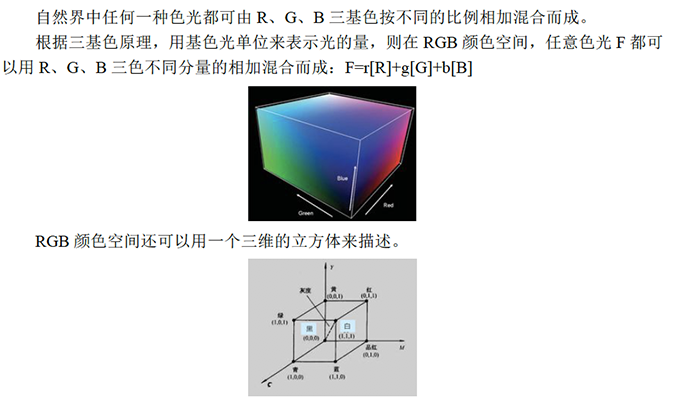
3.1 RGB色彩模型
3.2 HSV颜色模型
色彩可用色调/H(色相/ Hue)、饱和度/S(纯度/ Saturation)和亮度/V(明度/ Value)来描述。
人眼看到的任一彩色光都是这三个特性的综合效果,这三个特性即是色彩的三要素。其中色调与光波的波长有直接关系,亮度和饱和度与光波的幅度有关。
色饱和度表示播放的光的彩色鲜艳度,取决于彩色中的灰度,灰度越高,色彩饱和度即越低,反之亦然。

RGB与HSV彩色空间模型
色相H参数表示色彩信息,即所处的光谱颜色的位置。该参数用一角度量来表示,红、绿、蓝分别相隔120度。互补色分别相差180度。
纯度S为一比例值,范围从0到1,它表示成所选颜色的纯度和该颜色最大的纯度之间的比率。S=0时,只有灰度。
明度V表示色彩的明亮程度,范围从0到1。有一点要注意:它和光强度之间并没有直接的联系。
3.3 Lab色彩空间
RGB模式是一种发光屏幕的加色模式,而Lab模式既不依赖光线,也不依赖于颜料,它是国际照明委员会(CIE)组织确定的一个理论上包括了人眼可以看见的所有色彩的色彩模式。
它是用L*、a*、b*三个互相垂直的坐标轴来表示一个色彩空间。L*轴表示明度,黑在底端,白在顶端;+a*表示品红色,-a*表示绿色;+b*表示黄色,-b*表示蓝色。a*轴是红一绿色轴,b*轴是黄一蓝色轴。

Lab有三个通道,制作一个Lab模式的图像,从中可以发现,a和b通道几乎不能辨别出来,它们仅仅定义了图像的色彩部分,而没有定义图像的形态细节,因此在Lab模式的图像中颜色和层次是分离的,这一点与RGB是不一样的,这使得灰色曲线和彩色曲线可以分开调整,当使用者调整灰色曲线时,彩色的部分不受影响,因此可以只用没有颜色信息的L*通道确定图像的最亮和最暗值。
这样既可以避免在色彩校正过程中产生一些跳跃性的、阶调不连续的颜色,也可以只在L通道上锐化图像来强调图像的整体细微层次。
Lab颜色空间中的L分量用于表示像素的亮度,取值范围是[0,100],表示从纯黑到纯白;a表示从红色到绿色的范围,取值范围是[127,-128];b表示从黄色到蓝色的范围,取值范围是[127,-128]。
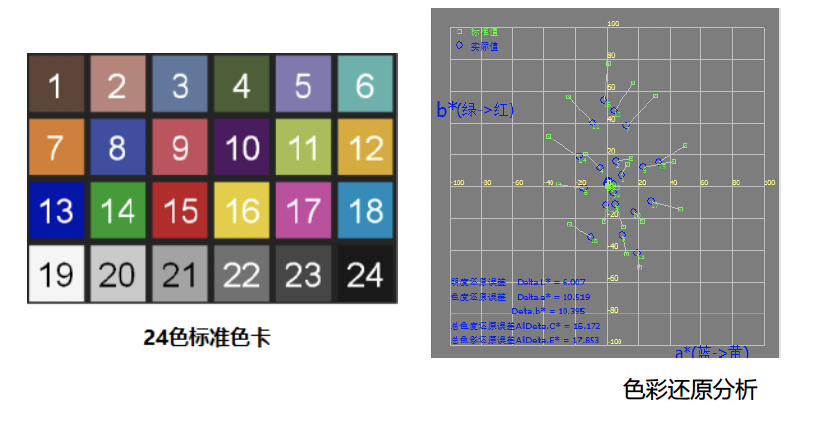
3.4 色彩还原分析
为了检测相机成像的对色彩的还原能力,在不同色温/光源条件下拍摄24色标准色卡,通过分析每个色块的平均R、G、B,将其转化到Lab色彩空间,最后与色卡的标准色进行比较计算得到:
名度还原误差、色度还原误差、总色度还原误差和总色彩还原误差。
 4:白平衡(White Balance)
4:白平衡(White Balance)
测试环境:白板测试环境。
色温表示光谱的成份,光的颜色。色温低表示长波光成份多;当色温改变时,光源中三基色的比例会发生变化,需要调节三基色的比例达到彩色的平衡,这就是白平衡调节技术。
在不同色温环境下,照白色物体,成像也应该是白色的。
4.1 白平衡数值表示
在图像区截取一个区域,计算该区间的RGB平均值 R、G、B,其白平衡为:

在不同色温环境下,照白色或中性灰色的物体时,三基色的比例达到彩色的平衡时,其White Balance数值接近于0;当超过某一大于0的数值时,表明白平衡欠佳。
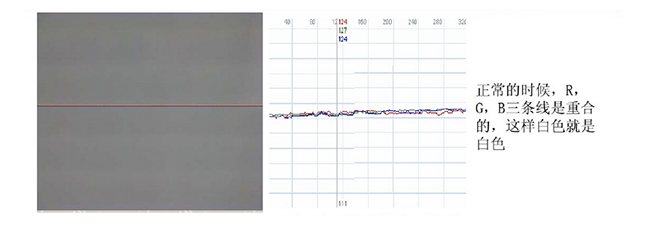
4.2 白平衡RGB图线表示
同样在不同色温环境下,照白色或中性灰色的物体时,在其成像中沿一指定路径(比如直线),已路径点为X坐标,路径上各个像素点的R、G、B值为Y坐标所组成的三条图线表示,三条曲线重合在一起,则说明是RGB颜色是平衡的。
5:动态范围
测试环境:灰阶卡测试环境。
动态范围表现了图像传感器在同一张照片中同时捕获光明和黑暗物体的能力,通常定义为最亮信号与最暗信号(噪声门槛级别)比值的对数,通常用54dB来作为商业图像传感器的通用指标。
具有较宽动态范围的 图像传感器可以在明光环境下提供更好的性能(例如,使用较窄动态范围传感器在明光环境下拍出的照片会出现“水洗”或模糊的现象。
5.1 灰阶描述

灰阶测试图卡底色为中灰,在取整数的近似条件下,均匀提取RGB(0,0,0)至RGB(255、255、255)共256级灰阶中的20级灰阶,用20个面积大小相等的矩形块分别填充上述20级灰度。每级反射密度相差0.1,图卡中设A、M、B三个标定相对应的反射密度是0.05、0.75 和1.65,它们代表着高光、中性灰度和阴影,背景密度和M点相同。

5.2 灰阶曲线描述

6:成像清晰度(Resolution)
测试环境:清晰度卡测试环境。
首先,一般测试分辨率时的拍摄距离就等于该模组的对焦距离,即在测试分辨率时将模组放在对焦距离的位置拍摄测试标板。
测试卡通常采用ISO12233测试卡或其它定制测试卡,测量算法一般采用MTF、TV_Line、SFR。

6.1 TV_Line(Transmission Line Pulsing)
TV Line全称Transmission Line Pulsing,也称“喷泉图”,单位:“线数”。意思是从水平方向上看,相当于将每行扫描线竖立起来,然后乘上宽高比,构成水平方向的总线,称水平分解力。
图像构成方式与像素的区别:TV Line的意思是电视行,用来衡量“分解被摄景物细节”的能力;像素则是各种颜色的一个一个小点,像素越多,图可以放得越大越清晰。二者都可以形成图像,但形成图像的原理却不同:TV Line以线成像,而像素是以点成像。
TV line主要用于主观测试,由于计算机的广泛应用,也由图像处理软件检测TV line的线数。
图像处理算法
沿TV Line的方向,逐行扫描,分析出每行的灰度曲线,分别求其一阶导数、二阶导数,根据导数变化确定线条的边界,即“数出”此时的线条数量;依次扫描、分析处理、“数线”,直到“数线”不能数出为止。
使用“喷泉图”测量,比较直观,但与测试卡在图像区是否充满有关,对环境要求稍高,日韩系厂商和终端客户较多。

6.2 MTF (Modulation Transfer Function)
MTF是Modulation Transfer Function的英文简称,中文为调制传递函数。是指调制度随空间频率变化的函数称为调制度传递函数,它描述的是对空间细节分辨的能力,单位以line/mm来表示。
调制传递函数类似于对比度的概念,其数学表达公式如下:
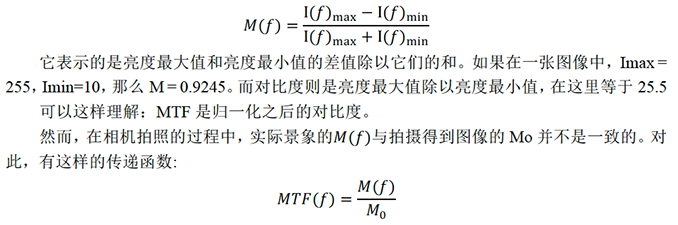
它表示的是经过相机拍摄后对比度的变化。如果MTF=1,那表示成像的质量非常的高,基本上无损传输了。它衡量的是该镜头将原图像转化到具体成像之间的传递能力。
而在实际测试的过程中,通常都是采用的如下所示的线对来分析计算。

在上图中,上面的是原图像,下面表示相机拍摄得到的图像。可以看出线对的边缘经过镜头之后明显变得模糊,并且线对越密越模糊,相应的MTF也就越低。
MTF测试与测试卡在图像区是否充满有关,国内CCM厂商使用比较多;
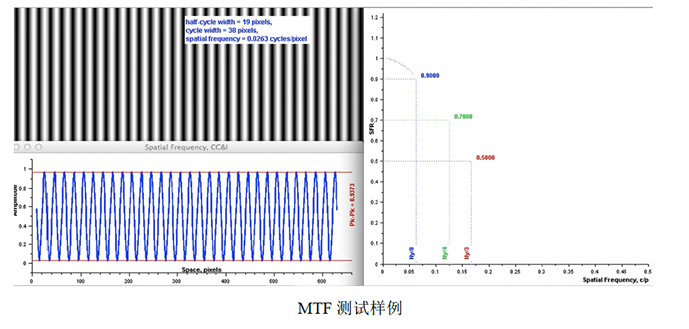
6.3 SFR (Spatial Frequency Response)
SFR是Spatial Rrequency Response的缩写,主要是用于测量随着空间频率的线条增加对单一影像的所造成影响。简言之SFR就是MTF的另外一种表示方法。
测试方法有狭缝、针孔测试和斜边测试。但通常使用斜边测试,这种方法在很大程度上精简了测试流程,对测试环境要求不高。
在表示相机图像解析力时,通常采用MTF50或者MTF50P。
MTF50表示的是MTF为最大值的50%(即MTF=0.5)时,对应的空间频率。
由于在图像拍摄过程中,图像处理模块有可能会对图像进行锐利化,对MTF的数值有所影响,而为了避免这样的影响,则规定MTF50P是相机拍摄后的图像的MTF最大值的50%对应的空间频率。
SFR比较抽象,欧美系厂商及终端客户使用较多。

6.4 小结
因此,选择MTF和TV_Line算法时,需要根据摄像头模组的视场大小,准确地计算测试卡的大小,使得测试卡的图像区正好充满画面。需要将此时的读数换算成正确的分辨率数值。
由于镜头的原因,所成图像的不同位置,图像的清晰度有所不一,所以,测量时,要选择不同的图像位置。对于TV_Line和SFR甚至要沿竖直和水平的方位分别测量。
MTF和TV_Line与测试卡在图像区是否充满有关,对环境要求稍高;
SFR与测试卡在图像区是否充满无关,对环境要求不高。
7: 光学防抖测试
测试环境:清晰度卡测试环境。
在模拟摄像头模组抖动机构时,对测试卡上的目标点,重复多次位置测量,计算目标点的位置变化,以评价光学防抖的效果。
7.1 测试模型

7.2 测试流程

隆测技术为您提供整套的摄像头模组检测解决方案
电话:0755-29952252, 刘航:14776081308
QQ:2710131297
完整文章下载